MARPO_DREDGER
El programa MARPO-DREDGER de SPE Dredging Solutions GmbH & Co. KG describe el funcionamiento del hardware y software del sistema de control de extracción creado por nuestra propia empresa. Para ofrecerle un rendimiento elevado y fiable, en él hemos utilizado exclusivamente componentes eficaces de calidad industrial.
En primer lugar, la posición del equipo de extracción móvil se determina por navegación vía satélite mediante un receptor DGPS dotado de brújula digital. A continuación, los elementos de medición correspondientes (manómetro, inclinómetro, etc.) captan la profundidad de trabajo de la herramienta de perforación, y los datos son evaluados por el ordenador y luego introducidos en un modelo digital a color de la superficie de extracción. Un monitor TFT de pantalla táctil integrado –que también sirve para manejar el sistema– permite finalmente al conductor de la draga visualizar todos los datos en varias modalidades: en una vista de pantalla dividida, como plano de situación 2D o 3D, en una representación seccional de perfil definida por el usuario en el equipo de extracción o en un modo de pantalla completa.
El uso de ecosondas permite obtener más información acerca de la superficie de extracción. Para ello, las profundidades medidas por sensores de ecosonda se representan en el plano de situación como profundidad en el equipo de extracción y –siempre que ello haya sido indicado y encargado por el cliente– son completadas con otros datos de funcionamiento (velocidad de la bomba, presiones, etc.).
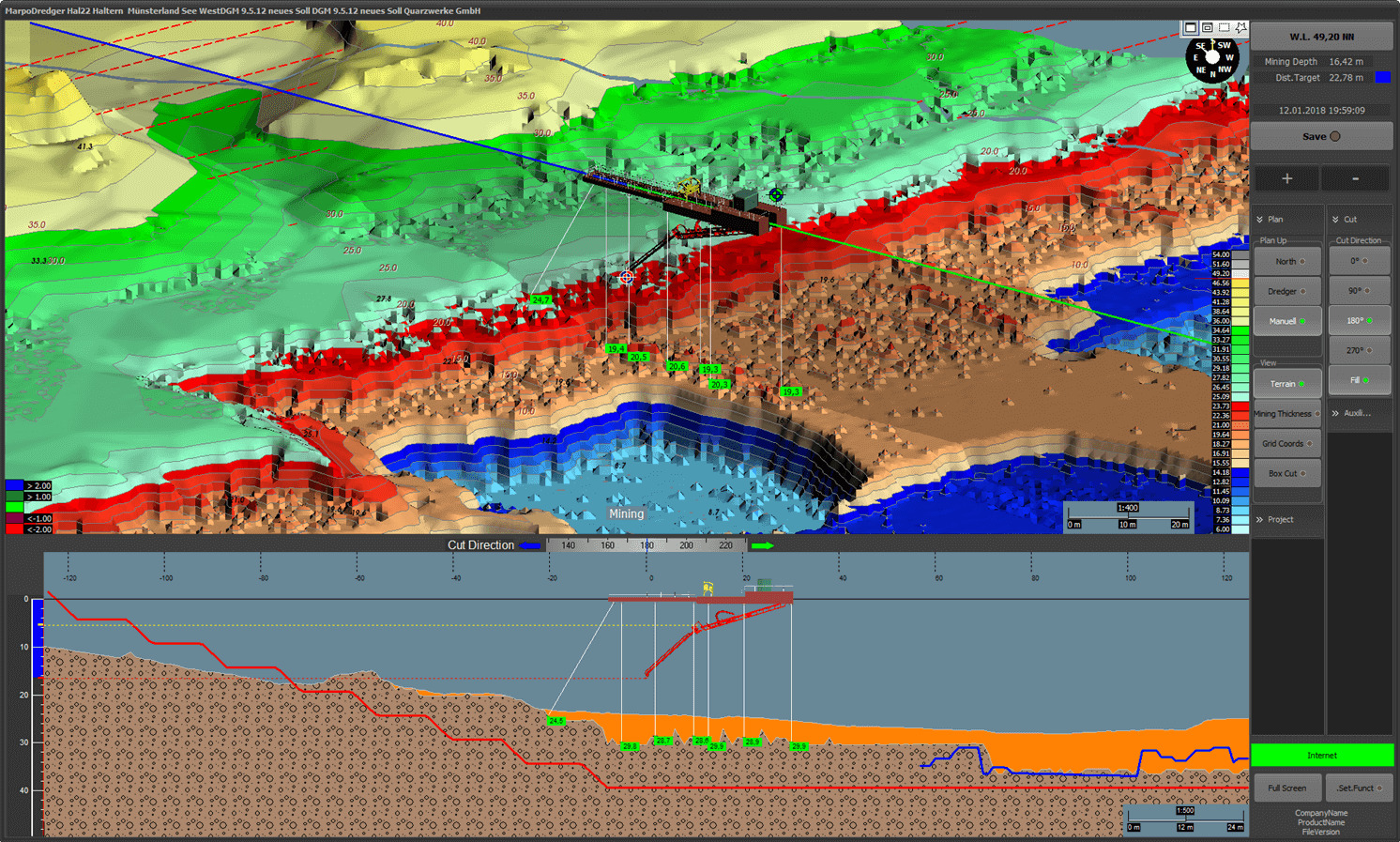
Figura: Software MARPO_DREDGER. Ventana superior: vista 2D/3D del MDT. Ventana inferior: representación seccional de perfil. La orientación, la dirección visual y la escala pueden elegirse libremente. El proceso de extracción se visualiza en tiempo real.
Los datos siguientes pueden visualizarse durante el dragado en el monitor TFT integrado:
- Límites de campo y extracción, inclinaciones de talud, horizontes de explotación, rangos de tolerancia y especificaciones de funcionamiento;
- Morfología del lecho del agua;
- Taludes teóricos y reales;
- Espesor extraíble en la posición actual de la draga;
- Obstáculos al dragado, bancos intercalados, otras particularidades de la gravera;
- Posición actual de la herramienta de perforación con precisión adecuada de posicionamiento (hasta el rango decimétrico);
- Consecución del rendimiento superficial pretendido por el marcado coloreado de áreas no suficientemente explotadas;
- Posición de anclas y cables de ancla.
Opciones de ampliación
Su estructura modular hace que pueda adaptarse a las condiciones de uso concretas y ampliarse con numerosos elementos:
- Sonares de talud, ecosondas, escáneres de sonar de 360°
- Mareómetros
- Transferencia directa de datos desde la draga al ordenador de la administración
- Captador de datos de funcionamiento (registro de parámetros técnicos, tales como el consumo de corriente, la velocidad de la rueda elevadora, el caudal, etc.)
- Visualización a distancia del proceso de extracción
- Sistema SAI
SPE Dredging Solutions GmbH
Klopstockstr. 13
D – 22765 Hamburg
Teléfono: +49(0)40 390 63 55
E-mail: info(at)spe-electronics.de
Aviso legal | Política de privacidad