Le programme MARPO-DREDGER de la société SPE GmbH & Co. KG décrit le fonctionnement du matériel et du logiciel de notre installation destinée au contrôle des mines, que nous avons développés nous-mêmes. Afin de vous offrir une prestation fiable et de haute qualité, nous avons utilisé exclusivement des composants robustes de qualité industrielle.
La détermination de la position de l’appareil d’extraction mobile s’effectue tout d’abord à l’aide d’un récepteur DGPS doté d’une boussole numérique par navigation satellite. Des capteurs adéquats (manomètres, inclinomètres, etc.) permettent ensuite de déterminer la profondeur de travail de l’outil de desserrage, d’évaluer les données par ordinateur et de les lire dans un modèle en couleur digitalisé de la surface d’extraction. Un écran tactile TFT, utilisé aussi pour la commande du système, permet d’afficher toutes les données nécessaires pour le conducteur de l’excavatrice –il s’agit d’un affichage partagé (plan 2D ou vue en 3D), d’une représentation personnalisée de coupes de profilés à bord de l’appareil d’extraction ou d’une représentation en mode plein écran.
Des informations supplémentaires sur la surface d’extraction sont possibles grâce à l’utilisation des échosondeurs. A cet effet, les profondeurs mesurées par les capteurs de échosondeurs sont affichées dans le plan d’implantation au niveau du dispositif d’extraction et – si cette opération est spécifiée et commandée par le client – complétées par d’autres données opérationnelles (par ex. régime de la pompe, pressions, etc.).
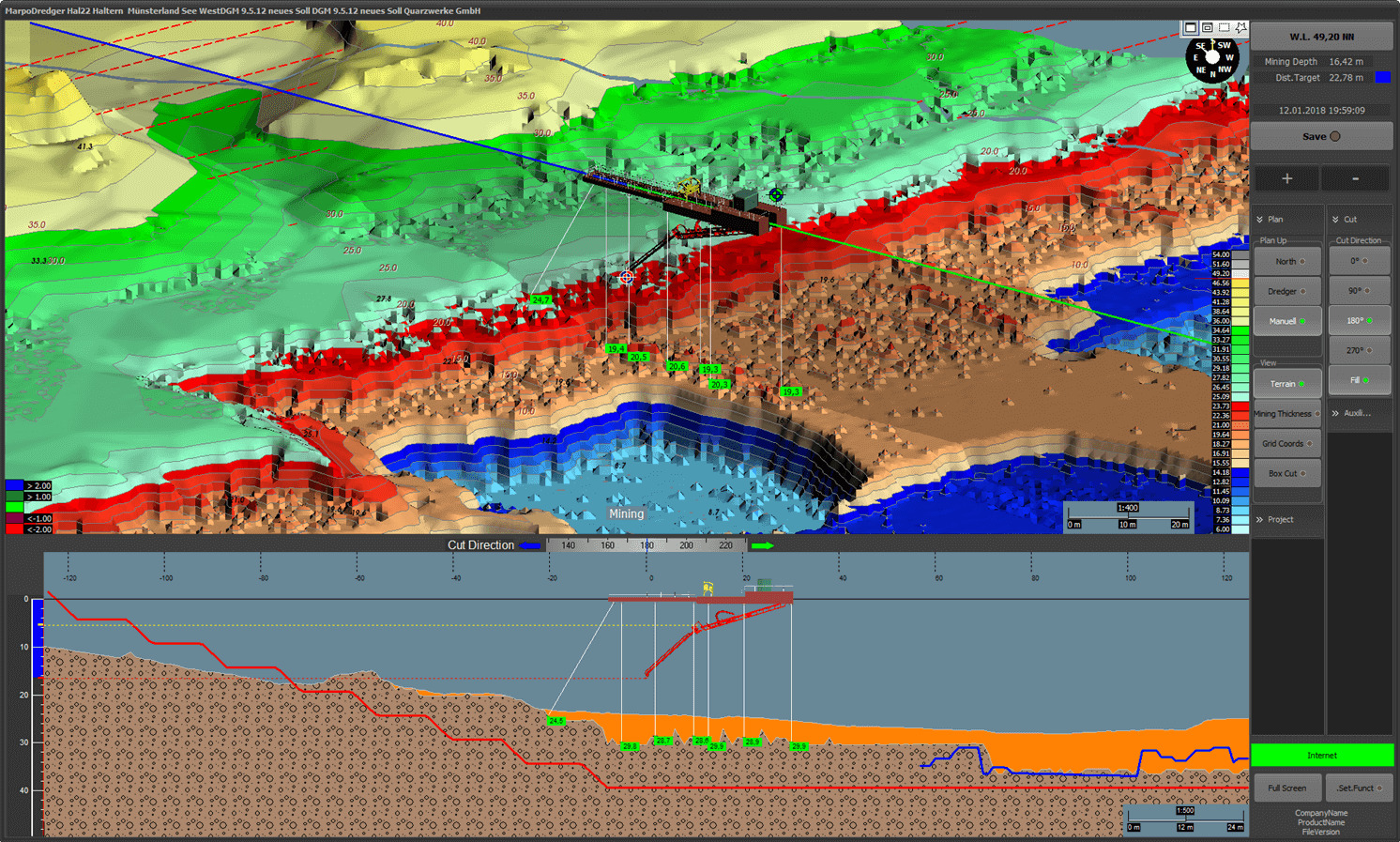
Figure : Logiciel MARPO_DREDGER. Fenêtre supérieure : vue 2D/3D du modèle numérique de terrain (MNT). Fenêtre inférieure : représentation de la coupe de profil. L‘orientation, la direction de visualisation et l’échelle sont librement sélectionnables. Le processus dégradation est visualisé en temps réel.
Pendant le dragage, les données suivantes peuvent être visualisées sur le moniteur tactile TFT installé à bord ;
- Limites des champs, limites d’extraction, inclinaisons du talus, horizons d’extraction, plages de tolérance et spécifications de fonctionnement ;
- Morphologie du lit de la rivière ;
- Talus réels et théoriques ;
- Epaisseur exploitable sur l’actuelle position de dragage ;
- Obstacles aux dragage, agents intermédiaires, autres particularités du produit ;
- Position actuelle de l’outil de desserrage en cas de précision de positionnement adéquate (corrections décimétriques) ;
- Succès de l’usure en nappes visé, grâce au marquage codifié en couleur des quartiers non suffisamment exploités.
- Position des ancres et des cordes d’amarrage
Options d‘extension
Sa conception modulaire lui permet d’être adaptée aux conditions d’utilisation respectives et d’être complétée par de nombreux éléments :
- Sonar pour talus, échosondeurs, sonar-scanner360°
- Niveau Radio
- Transfert direct des données de l’excavatrice vers l’ordinateur de la gestion des opérations
- Système d’acquisition des données opérationnelles (enregistrement des données de la machine, par ex. : consommation électrique, régime de la roue à aubes, débit, etc.)
- Télévisualisation du processus d‘extraction
- UPS
SPE GmbH & Co. KG
Ritscherstraße 5
D – 21244 Buchholz
Telefon: +49(0)40 390 63 55
E-Mail: info(at)spe-electronics.de
Impressum | Datenschutz